
Los servomotores son dispositivos esenciales en la automatización y robótica, permitiendo un control preciso del movimiento. Comprender las diferentes partes que conforman un servomotor es fundamental para su correcto funcionamiento y para la creación de proyectos eléctricos exitosos. En esta guía completa, exploraremos en detalle cada componente, desde el rotor hasta el circuito de control, desentrañando el funcionamiento interno de estos poderosos motores.
Índice
- Conclusiones Clave
- Las Partes Clave de un Servomotor para tu Proyecto de Electricidad
- El Motor: Corazón del Servomotor
- Engranajes: Transmitiendo la Potencia
- Circuito de Control: El Cerebro del Servomotor
- Sensores: Feedback para un Movimiento Preciso
- Aplicaciones de los Servomotores
- Ventajas y Desventajas de los Servomotores
- Ensamblaje y Control de un Servomotor
- Video sobre Servomotor Partes: Guía Completa para Proyectos de Electricidad
- Preguntas Frecuentes
- A Modo de Resumen
- Compartelo
Conclusiones Clave
- Motor DC de alto torque.
- Engranajes de reducción.
- Sensor de posición.
- Circuito de control.
- Potenciómetro.
- Circuito electrónico.
- Conector de alimentación.
- Carcasa protectora.
Las Partes Clave de un Servomotor para tu Proyecto de Electricidad
Este artículo te introduce a las partes esenciales de un servomotor y cómo funcionan, brindándote una base sólida para proyectos de electricidad.
Un servomotor, un dispositivo de control de movimiento electromecánico, se compone de cuatro partes clave:
- Motor: Un motor eléctrico estándar que gira al recibir corriente eléctrica.
- Engranajes: Transfieren la energía del motor al eje del servomotor, reduciendo la velocidad y aumentando la fuerza.
- Circuito de control: Envia señales de corriente continua al motor para controlar su rotación.
- Sensores: Detectan la posición del motor, asegurando que se detenga en el punto deseado.
Un servomotor recibe una señal eléctrica desde un controlador, como un control remoto o un ordenador, la convierte en energía mecánica gracias al motor, y luego la amplifica para generar mayor potencia. El cuerpo reductor conectado al rotor traduce la energía en movimiento, cuya posición se mide por sensores ópticos o magnéticos. Esta información se compara con la posición deseada, y el servomotor ajusta su posición según sea necesario.
Los servomotores son usados en diversos campos, como la robótica, la industria automotriz, la aeronáutica, la maquinaria industrial, el equipamiento médico, el control de procesos, los juguetes y los laboratorios educativos.
Un servomotor es un dispositivo electromecánico que interactúa para generar un movimiento controlado. Sus partes principales son:
- Motor eléctrico: Con un rotor y un estátor, alimentado por una fuente de alimentación eléctrica.
- Engranaje: Transforma la rotación del motor en movimiento lineal.
- Placa base: Contiene los componentes electrónicos y el motor.
- Sensor: Detecta el movimiento del motor.
- Circuito de control: Controla la alimentación eléctrica del motor.
- Software de control: Leen los datos del sensor y controlan el servomotor según las instrucciones dadas.
Los servomotores se controlan usando señales eléctricas para modificar su velocidad y dirección. Estas señales se generan a través de un microcontrolador, como Arduino o un PLC. El protocolo de comunicación correcto es clave para controlar un servomotor.
Las ventajas de utilizar un servomotor en proyectos de electricidad son:
- Alta precisión en los movimientos.
- Movimiento constante sin interrupciones.
- Tamaño pequeño, fácil instalación y manipulación.
- Amplio rango de velocidades.
- Calibración precisa de la dirección.
- Respuesta rápida a cambios en los parámetros de entrada.
- Reactivación rápida después de un corto periodo de inactividad.
Las desventajas de usar un servomotor incluyen:
- Necesidad de un circuito de control para funcionar.
- Costo elevado en comparación con otros motores.
- Mantenimiento complicado debido a los componentes electrónicos.
- Requiere alimentación de corriente continua.
- No apto para aplicaciones de gran potencia.
- Menos eficiente energéticamente que otros motores.
- Requiere una señal de control compleja.
El ensamblaje de un servomotor implica:
Lee También Relatran: Simulador de Mecanismos Online para Secundaria Descarga y Practica
Relatran: Simulador de Mecanismos Online para Secundaria Descarga y Practica- Elegir el servomotor adecuado para el proyecto.
- Conectar el cableado adecuado.
- Montar el circuito.
- Ensamblar el servomotor.
- Realizar pruebas finales y calibración.
Controlar un servomotor requiere los siguientes equipos:
- Microcontrolador: Controlador principal del robot.
- Servomotor: Motor de corriente continua que realiza movimientos controlados.
- Controlador de servomotor: Convierte datos del microcontrolador en señales para el servomotor.
- Fuente de alimentación: Suministra energía al sistema.
Para optimizar proyectos eléctricos es recomendable buscar opciones de software adecuadas para el control.
¡Ahora que conoces las partes clave de un servomotor, puedes comenzar a explorar sus aplicaciones y oportunidades en tus proyectos de electricidad!
Sigamos profundizando en las diferentes partes de un servomotor.
El Motor: Corazón del Servomotor
El motor eléctrico: Su función principal
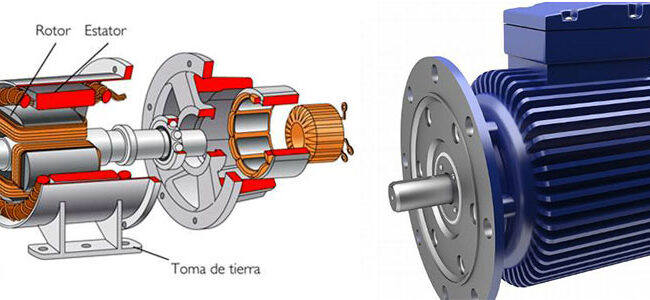
El motor eléctrico es el corazón de cualquier servomotor, convirtiendo la energía eléctrica en energía mecánica. Este motor se compone de dos partes principales:
- Rotor: El rotor es el eje que gira y está equipado con un imán permanente o un bobinado de alambre.
- Estator: El estátor es la parte estacionaria que rodea el rotor y contiene bobinados de alambre que generan un campo magnético cuando se aplica corriente.
Cuando se aplica corriente al bobinado del estátor, se crea un campo magnético que interactúa con el campo magnético del rotor. Esta interacción crea una fuerza que hace girar el rotor, generando el movimiento de rotación deseado.
El motor eléctrico es la base del movimiento del servomotor, pero no es el único factor que determina su precisión y control.
Tipos de motores usados en servomotores
Los servomotores utilizan diferentes tipos de motores eléctricos, cada uno con sus propias características y ventajas:
Motores de corriente continua (DC): Los motores de corriente continua son los más comunes en servomotores. Son simples, relativamente económicos y fáciles de controlar.
Motores de corriente alterna (AC): Los motores de corriente alterna son menos comunes en servomotores, pero ofrecen ventajas como mayor potencia y mayor torque.
Motores paso a paso: Los motores paso a paso son ideales para aplicaciones que requieren un control preciso de la posición. Se caracterizan por su capacidad de moverse en pasos discretos, con una alta precisión y repetibilidad.
Motores síncronos: Los motores síncronos son conocidos por su alta eficiencia y precisión. En estos motores, el rotor gira a la misma velocidad que el campo magnético rotatorio del estátor.
La elección del tipo de motor depende de las necesidades específicas del proyecto y las características del servomotor.
Engranajes: Transmitiendo la Potencia
Relación de transmisión y su impacto en el movimiento
Los engranajes son la parte que transmite la potencia del motor al eje del servomotor, reduciendo la velocidad y aumentando la fuerza.
La relación de transmisión de los engranajes es crucial para determinar la velocidad de salida del servomotor. Se calcula dividiendo el número de dientes del engranaje de entrada por el número de dientes del engranaje de salida.
Una relación de transmisión alta reduce la velocidad de salida del servomotor pero aumenta la fuerza de salida.
Ejemplo: Si un servomotor tiene una relación de transmisión de 10:1, por cada revolución del motor, el eje del servomotor dará una décima parte de revolución. Sin embargo, la fuerza de salida será 10 veces mayor que la fuerza del motor.
Materiales utilizados en la construcción de los engranajes
La elección del material para los engranajes es fundamental para garantizar su resistencia y durabilidad. Algunos materiales comunes utilizados en la construcción de engranajes en servomotores son:
Acero: El acero es un material resistente y duradero, ideal para aplicaciones que requieren alta resistencia y precisión.
Plástico: El plástico es un material ligero y económico, ideal para aplicaciones de bajo torque.
Bronce: El bronce es un material resistente a la corrosión, ideal para aplicaciones que requieren una larga vida útil.
Aluminio: El aluminio es un material ligero y resistente, ideal para aplicaciones que requieren un peso ligero.
La selección del material depende de las necesidades específicas de la aplicación, el torque requerido y el entorno de funcionamiento del servomotor.
Circuito de Control: El Cerebro del Servomotor
Tipos de circuitos de control y su funcionamiento
El circuito de control es el cerebro del servomotor, recibiendo señales eléctricas del controlador y enviando señales al motor para controlar su rotación.
Los circuitos de control pueden ser analógicos o digitales:
Circuitos de control analógicos: Utilizan señales analógicas para controlar el servomotor. Son más simples y menos costosos, pero tienen menor precisión.
Circuitos de control digitales: Utilizan señales digitales para controlar el servomotor. Son más precisos y versátiles, pero más complejos y costosos.
Los circuitos de control digitales son más comunes en servomotores modernos debido a su mayor precisión y capacidad de control.
Ejemplos de componentes electrónicos en el circuito de control
El circuito de control de un servomotor suele incluir varios componentes electrónicos:
Microcontrolador: El microcontrolador es el corazón del circuito de control, responsable de procesar las señales del controlador y enviar las señales al motor.
Puente H: El puente H es un circuito que permite al microcontrolador controlar la dirección de la corriente al motor.
Controlador de velocidad: El controlador de velocidad ajusta la velocidad del motor.
Sensor de posición: El sensor de posición proporciona información al microcontrolador sobre la posición actual del motor.
Convertidor analógico a digital (ADC): El ADC convierte señales analógicas del sensor de posición en señales digitales que el microcontrolador puede entender.
El circuito de control es crucial para la precisión y el control del servomotor, ya que recibe y procesa señales eléctricas para controlar el movimiento del motor.
Sensores: Feedback para un Movimiento Preciso
Sensores de posición: Tipos y funcionamiento
Los sensores son la parte crucial que proporciona feedback al circuito de control sobre la posición actual del motor. Esta información se utiliza para garantizar que el servomotor se detenga en el punto deseado con precisión.
Los sensores de posición más comunes en los servomotores son:
Sensores potenciométricos: Los sensores potenciométricos son los más simples y económicos. Se basan en un potenciómetro que varía su resistencia según la posición del eje del servomotor.
Sensores de efecto Hall: Los sensores de efecto Hall detectan campos magnéticos. Se utilizan para determinar la posición del rotor magnético del servomotor.
Sensores ópticos: Los sensores ópticos utilizan un haz de luz para determinar la posición del motor. Son más precisos que los potenciométricos y los sensores de efecto Hall.
Sensores de posición absoluta: Los sensores de posición absoluta proporcionan una lectura precisa de la posición del motor, independientemente de su posición inicial.
La elección del sensor de posición depende de la precisión requerida, el rango de movimiento del servomotor y el costo.
Importancia de los sensores en la precisión del movimiento
Los sensores de posición son cruciales para la precisión del servomotor. Proporcionan feedback al circuito de control, permitiendo un control preciso del movimiento del servomotor y asegurando que se detenga en el punto deseado.
Sin un sensor de posición, el servomotor no podría determinar su posición actual y no podría moverse con precisión.
Aplicaciones de los Servomotores
Servomotores en la robótica
Los servomotores son componentes esenciales en la robótica, proporcionando movimiento preciso y controlado a los brazos robóticos, las piernas, las manos y otros componentes.
Manipulación de objetos: Los servomotores se utilizan para manipular objetos, mover piezas en líneas de producción y realizar tareas complejas en la industria.
Movimiento de brazos robóticos: Los servomotores permiten a los brazos robóticos realizar movimientos precisos y complejos, desde tareas simples como levantar objetos hasta tareas complejas como la cirugía robótica.
Navegación de robots móviles: Los servomotores se utilizan en robots móviles para controlar la dirección y la velocidad de movimiento, permitiendo a los robots navegar por entornos complejos.
Servomotores en la industria automotriz
Los servomotores se utilizan ampliamente en la industria automotriz para controlar diversos sistemas:
Control de acelerador electrónico: Los servomotores se utilizan en los sistemas de acelerador electrónico para controlar la apertura de la mariposa del acelerador, proporcionando una respuesta suave y precisa.
Dirección asistida eléctrica: Los servomotores se utilizan en sistemas de dirección asistida eléctrica para ayudar al conductor a girar el volante, mejorando la comodidad y la seguridad.
Control de ventanas y espejos: Los servomotores se utilizan para controlar la apertura y cierre de ventanas y espejos, proporcionando comodidad y seguridad.
Sistemas de suspensión activa: Los servomotores se utilizan en sistemas de suspensión activa para ajustar la altura y la firmeza de la suspensión, mejorando el confort y el rendimiento del vehículo.
Servomotores en la industria médica
Los servomotores se utilizan en diversos equipos médicos para proporcionar un control preciso y confiable:
Cirugía robótica: Los servomotores se utilizan en robots quirúrgicos para realizar movimientos precisos durante la cirugía, minimizando la invasión y mejorando la precisión.
Prótesis: Los servomotores se utilizan en prótesis para permitir a los pacientes realizar movimientos complejos con las extremidades artificiales.
Equipos de diagnóstico: Los servomotores se utilizan en equipos de diagnóstico, como los escáneres de resonancia magnética, para controlar el movimiento de las partes móviles del equipo.
Equipamiento médico portátil: Los servomotores se utilizan en equipos médicos portátiles, como las bombas de insulina, para controlar el movimiento de las partes móviles del equipo.
Ventajas y Desventajas de los Servomotores
Beneficios de los servomotores para proyectos de electricidad
Los servomotores ofrecen una serie de ventajas para proyectos de electricidad:
Alta precisión: Los servomotores pueden moverse con una alta precisión, lo que los convierte en ideales para aplicaciones que requieren un control preciso del movimiento.
Movimiento constante: Los servomotores pueden moverse de manera constante y sin interrupciones, lo que los convierte en ideales para aplicaciones que requieren un movimiento fluido y continuo.
Tamaño pequeño: Los servomotores son relativamente pequeños y compactos, lo que los convierte en ideales para aplicaciones con espacio limitado.
Fácil instalación: Los servomotores son fáciles de instalar y se pueden utilizar en una variedad de proyectos.
Amplio rango de velocidades: Los servomotores pueden funcionar a una variedad de velocidades, lo que los convierte en ideales para aplicaciones que requieren una variedad de velocidades de movimiento.
Calibración precisa: Los servomotores se pueden calibrar con precisión, lo que garantiza que se muevan en la dirección correcta.
Respuesta rápida: Los servomotores tienen una respuesta rápida a los cambios en los parámetros de entrada, lo que los convierte en ideales para aplicaciones que requieren un control rápido y preciso.
Reactivación rápida: Los servomotores pueden reactivarse rápidamente después de un corto periodo de inactividad, lo que los convierte en ideales para aplicaciones que requieren una respuesta rápida.
Limitaciones a considerar al utilizar servomotores
A pesar de sus muchas ventajas, los servomotores también tienen algunas limitaciones:
Necesidad de un circuito de control: Los servomotores requieren un circuito de control para funcionar, lo que aumenta la complejidad del proyecto.
Costo elevado: Los servomotores son más caros que otros tipos de motores, lo que puede ser un factor limitante para algunos proyectos.
Mantenimiento complicado: Los servomotores pueden ser difíciles de mantener debido a sus componentes electrónicos.
Requiere alimentación de corriente continua: Los servomotores generalmente funcionan con corriente continua, lo que puede requerir una fuente de alimentación adicional.
No apto para aplicaciones de gran potencia: Los servomotores no son ideales para aplicaciones de gran potencia, ya que tienen un torque limitado.
Menos eficiente energéticamente: Los servomotores pueden ser menos eficientes energéticamente que otros tipos de motores.
Requiere una señal de control compleja: Los servomotores requieren una señal de control compleja para funcionar correctamente, lo que puede ser un desafío para algunos proyectos.
Ensamblaje y Control de un Servomotor
Pasos para ensamblar un servomotor
El ensamblaje de un servomotor es un proceso relativamente simple, pero requiere atención al detalle:
Elegir el servomotor adecuado: La elección del servomotor adecuado depende de las necesidades específicas del proyecto, como el torque, la velocidad, la precisión y el tamaño.
Conectar el cableado adecuado: Los servomotores tienen tres cables principales: tierra, alimentación y señal. Es importante conectar los cables correctamente para evitar daños al servomotor.
Montar el circuito: El circuito de control del servomotor debe montarse correctamente y los componentes electrónicos deben conectarse correctamente.
Ensamblar el servomotor: El servomotor debe montarse de manera segura y el eje debe estar libre de movimiento.
Realizar pruebas finales y calibración: El servomotor debe probarse a fondo para garantizar que funcione correctamente.
Componentes necesarios para controlar un servomotor
Para controlar un servomotor, necesitarás los siguientes componentes:
Microcontrolador: El microcontrolador es el controlador principal del robot o sistema.
Servomotor: El servomotor es el motor de corriente continua que realiza movimientos controlados.
Controlador de servomotor: El controlador de servomotor convierte datos del microcontrolador en señales para el servomotor.
Fuente de alimentación: La fuente de alimentación suministra energía al sistema.
Software para optimizar proyectos con servomotores
El uso de software adecuado puede optimizar proyectos con servomotores:
Arduino IDE: Arduino IDE es un entorno de desarrollo integrado popular para proyectos de robótica y automatización.
Python: Python es un lenguaje de programación versátil que se utiliza en muchos proyectos de robótica y automatización.
MATLAB: MATLAB es un software de análisis y cálculo matemático que se puede utilizar para simular y controlar servomotores.
Simulink: Simulink es un software de simulación de sistemas que se puede utilizar para crear modelos de sistemas con servomotores.
El software adecuado puede facilitar el control y la programación de los servomotores, lo que permite a los usuarios realizar proyectos complejos y sofisticados.
¡Recuerda que los servomotores son herramientas versátiles que pueden mejorar la precisión y el control de tus proyectos de electricidad!
¿Tienes alguna pregunta sobre las partes de un servomotor o cómo controlarlos? Comparte tus preguntas y proyectos en las redes sociales!
Para obtener más información, puedes visitar los siguientes recursos:
¡Feliz creación!
Video sobre Servomotor Partes: Guía Completa para Proyectos de Electricidad
Preguntas Frecuentes
¿Qué tipo de motor se utiliza en un servomotor?
En un servomotor, el corazón del movimiento es el motor eléctrico. Estos pueden ser de diferentes tipos, cada uno con sus propias características y aplicaciones:
- Motores de corriente continua (DC): Estos son los más comunes por su simplicidad y bajo costo. Son fáciles de controlar y responden bien a cambios en la corriente eléctrica.
- Motores de corriente alterna (AC): Aunque menos comunes en servomotores, ofrecen mayor potencia y torque, lo que los hace adecuados para aplicaciones que requieren mayor fuerza.
- Motores paso a paso: Estos son ideales para movimientos precisos y repetibles, ya que se desplazan en pasos discretos.
- Motores síncronos: Estos destacan por su alta eficiencia y precisión, girando a la misma velocidad que el campo magnético del estátor.
La elección del motor depende de las necesidades específicas del proyecto y las características del servomotor en cuestión.
¿Cuál es la función de los engranajes en un servomotor?
Los engranajes son cruciales para el funcionamiento del servomotor. Son los encargados de transmitir la potencia del motor al eje, reduciendo la velocidad y aumentando la fuerza. La relación de transmisión, que es el número de dientes del engranaje de entrada dividido por el número de dientes del engranaje de salida, determina la velocidad de salida del servomotor.
Por ejemplo, una relación de transmisión de 10:1 significa que por cada revolución del motor, el eje del servomotor dará una décima parte de revolución, pero con 10 veces la fuerza del motor.
¿Cómo funciona el circuito de control de un servomotor?
El circuito de control es el "cerebro" del servomotor, responsable de recibir señales eléctricas del controlador y enviarlas al motor para controlar su rotación. Estos circuitos pueden ser analógicos o digitales. Los analógicos utilizan señales analógicas para controlar el motor, mientras que los digitales usan señales digitales.
Los circuitos digitales son más comunes en los servomotores modernos por su alta precisión y versatilidad. El circuito de control suele incluir componentes como un microcontrolador, un puente H, un controlador de velocidad, un sensor de posición y un convertidor analógico a digital.
¿Qué tipos de sensores de posición se usan en un servomotor?
Los sensores de posición son cruciales para la precisión del servomotor, ya que proporcionan feedback al circuito de control sobre la posición actual del motor. Algunos de los sensores más comunes son:
- Sensores potenciométricos: Estos son los más simples y económicos. Se basan en un potenciómetro que cambia su resistencia según la posición del eje.
- Sensores de efecto Hall: Estos detectan campos magnéticos y se utilizan para determinar la posición del rotor magnético del servomotor.
- Sensores ópticos: Estos utilizan un haz de luz para determinar la posición, ofreciendo mayor precisión que los potenciométricos y los sensores de efecto Hall.
- Sensores de posición absoluta: Estos proporcionan una lectura precisa de la posición del motor, independientemente de su posición inicial.
La elección del sensor de posición dependerá de la precisión, el rango de movimiento del servomotor y el costo.
¿Cómo se pueden controlar los servomotores?
Para controlar un servomotor se necesita un sistema que traduzca las señales del controlador en acciones del motor. Un sistema típico incluye:
- Un microcontrolador: Este es el "cerebro" que procesa las señales del usuario y genera las instrucciones para el servomotor.
- Un controlador de servomotor: Este convierte las señales del microcontrolador en comandos que el servomotor puede entender.
- El servomotor en sí: El motor eléctrico que realiza el movimiento controlado.
- Una fuente de alimentación: Para suministrar energía al sistema.
El control de un servomotor puede ser tan simple como moverlo a una posición específica o tan complejo como realizar secuencias de movimientos complejos. Existen diversos programas y plataformas, como Arduino IDE, Python, MATLAB, y Simulink, que facilitan el control y la programación de los servomotores.
A Modo de Resumen
En este viaje por el fascinante mundo de los servomotores, hemos desentrañado las partes que constituyen su alma: un motor eléctrico que genera la fuerza, engranajes que la transmiten, un circuito de control que la dirige y sensores que la calibran. Estas piezas, como engranajes de un reloj, trabajan en sincronía para crear movimientos controlados y precisos. Desde la robótica hasta la medicina, los servomotores se han convertido en herramientas esenciales para proyectos de electricidad, transformando ideas en realidades tangibles. Así, cada vez que te encuentres frente a un proyecto que requiera un movimiento preciso, recuerda la danza de estas piezas que se combinan para hacer posible lo imposible.
Compartelo
¡Descubre el corazón de un servomotor! Este artículo te desvela las partes clave que hacen posible su funcionamiento y te ayuda a comprender mejor cómo funcionan estos dispositivos electromecánicos tan versátiles. Desde el motor eléctrico hasta el circuito de control, este artículo te ofrece una guía completa para usar servomotores en tus proyectos de electricidad. ¡Prepárate para construir robots, automatizar procesos y dar vida a tus ideas!
Comparte este artículo con tus amigos y compañeros que también son apasionados por la electrónica y la robótica. ¡Ayúdanos a difundir el conocimiento y a crear una comunidad de innovación!
#servomotor #electricidad #robótica #ingeniería #tecnología #proyectos #aprendizaje
Robots Poliarticulados: Guía Completa para Proyectos de Electrónica
Motores en Derivación: Funcionamiento, Ventajas y Aplicaciones

Cómo Hacer un Detector de Metales Casero Potente: Guía Paso a Paso

Hadrian X: El robot albañil que construye casas 4 veces más rápido
Curso Robótica para Principiantes: Construye tu Propio Robot
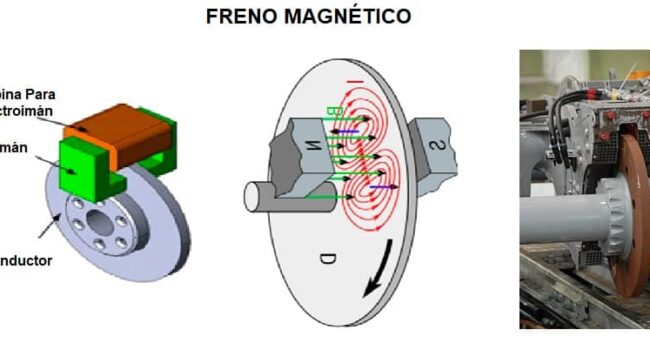
Freno Magnético: Funcionamiento, Aplicaciones y Experimento Simple
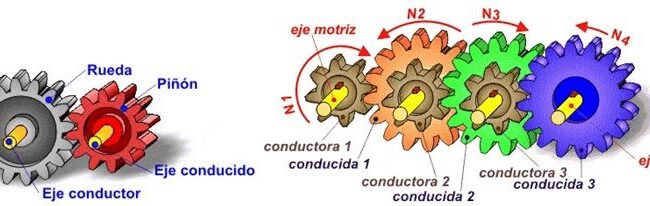
Engranajes: Guía Completa de Tipos, Cálculos y Aplicaciones
Sentido de Giro de un Motor Eléctrico: Guía Completa para Principiantes
Tipos de Robots: Guía Completa y Clasificación
Deja una respuesta
También te puede interesar: