
En el apasionante mundo de la robótica, los robots poliarticulados se erigen como pilares de la automatización industrial. Su estructura articulada, inspirada en la anatomía humana, les confiere una versatilidad y precisión inigualables. Descubre en esta guía completa las características, aplicaciones y ventajas de estos robots que revolucionan la electrónica y el diseño industrial.
Índice
- Resumen Clave
- Robots Poliarticulados: Una Herramienta Esencial para Proyectos de Electrónica
- Tipos de Robots Poliarticulados
- Componentes Clave de un Robot Poliarticulado
- Actuadores en Robots Poliarticulados
- Habilidades de los Robots Poliarticulados
- Aplicaciones de Robots Poliarticulados en Electrónica
- Diseño de Robots Poliarticulados para Proyectos de Electrónica
- Video sobre Robots Poliarticulados: Guía Completa para Proyectos de Electrónica
- Preguntas Frecuentes sobre Robots Poliarticulados
- ¿Qué son exactamente los robots poliarticulados y por qué son tan relevantes en proyectos de electrónica?
- ¿Cómo se diferencian los robots poliarticulados de otros tipos de robots?
- ¿Qué tipos de actuadores se utilizan en los robots poliarticulados y cuál es su función?
- ¿Cómo se programan los robots poliarticulados y qué tipo de lenguajes se utilizan?
- ¿Cuáles son algunas de las aplicaciones más comunes de los robots poliarticulados en la industria electrónica?
- Concluyendo
- Compartelo
Resumen Clave
- Robots con articulaciones múltiples para movimiento flexible.
- Amplio rango de movimiento, similar al brazo humano.
- Utilizados en tareas de manipulación, soldadura y ensamblaje.
- Compuestos por eslabones unidos por articulaciones rotatorias o prismáticas.
- Ofrecen precisión, repetibilidad y alta velocidad en sus movimientos.
- Clasificación según número de ejes: 4, 6, o más.
- Aplicaciones en la industria, medicina, investigación y educación.
- Integración de sensores para mayor autonomía e inteligencia.
Robots Poliarticulados: Una Herramienta Esencial para Proyectos de Electrónica
Este artículo explora los robots poliarticulados, su funcionamiento y su creciente importancia en el ámbito de la electrónica. Estos robots, también conocidos como robots multifunción, son máquinas programables con múltiples articulaciones que les permiten imitar movimientos humanos.
El texto destaca la versatilidad de estos robots, capaces de realizar tareas que van desde la manipulación de objetos pequeños hasta el ensamblaje de componentes electrónicos, pasando por la inspección de productos y la recolección de datos. Se mencionan ejemplos específicos de robots poliarticulados: robots de seguimiento, robots industriales, robots de ensamblaje y robots educativos.
El artículo profundiza en la estructura de estos robots, describiendo sus principales componentes: estructura, articulaciones, actuadores, controlador y sensores. Cada componente juega un papel crucial en el funcionamiento del robot. Además, se detalla la variedad de actuadores utilizados en robots poliarticulados, incluyendo motores DC, motores stepper, servomotores, actuadores de gravedad, eléctricos, neumáticos e hidráulicos.
Se exploran las habilidades que pueden desarrollar los robots poliarticulados, destacando su capacidad para interactuar con el entorno, manipular objetos, navegar por obstáculos, recopilar información geográfica, aprender movimientos autónomos, tomar decisiones basadas en la información recopilada y planificar acciones futuras.
Finalmente, el artículo analiza las aplicaciones de los robots poliarticulados en proyectos de electrónica, incluyendo el ensamblaje de componentes, la producción en línea, la exploración y recolección de datos, y la educación. Se concluye con una guía sobre los factores a considerar al diseñar robots poliarticulados para proyectos de electrónica, incluyendo la determinación de las necesidades, el control de los motores, el diseño mecánico y la selección de materiales.
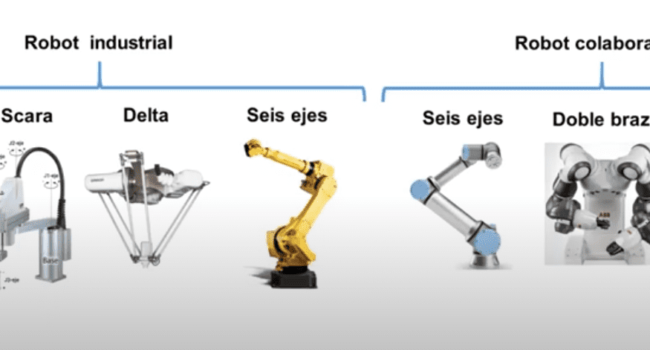
Tipos de Robots Poliarticulados
Robots de Seguimiento
Imagina un robot que sigue un camino preestablecido, moviéndose con precisión y seguridad. Este tipo de robot, conocido como robot de seguimiento, es una herramienta indispensable en diversas áreas, desde la fabricación hasta la logística. Sus aplicaciones son tan variadas como sus funciones:
- Transporte de materiales: Los robots de seguimiento son ideales para transportar materiales de forma autónoma, desde piezas pequeñas hasta productos de gran tamaño. Esto permite optimizar el flujo de trabajo en fábricas, almacenes y centros de distribución.
- Inspección de productos: En la industria, la calidad es esencial. Los robots de seguimiento pueden ser programados para inspeccionar productos durante el proceso de producción, garantizando la calidad y detectando posibles errores.
- Sistemas de seguridad: Los robots de seguimiento pueden ser utilizados para vigilar áreas sensibles, ofreciendo mayor seguridad en fábricas, bancos y otros lugares.
Su diseño se centra en la precisión y la capacidad de seguimiento, utilizando sensores para determinar su posición y seguir un camino definido. La tecnología utilizada en estos robots va desde el control por láser hasta la visión artificial, permitiéndoles adaptarse a diferentes entornos.
Robots Industriales
Los robots industriales son la columna vertebral de la automatización en la industria. Su capacidad de realizar tareas repetitivas con precisión y rapidez los convierte en una herramienta esencial en procesos de producción de gran volumen. Son diseñados para trabajar en entornos industriales complejos, y sus funciones son diversas:
- Soldadura: La soldadura es una tarea crucial en la industria, y los robots industriales pueden realizarla con precisión y seguridad, evitando errores humanos.
- Pintura: Los robots de pintura pueden realizar acabados de alta calidad en diversos productos, desde automóviles hasta electrodomésticos.
- Manipulación de piezas: Los robots industriales son capaces de levantar, transportar y manipular piezas pesadas con facilidad, mejorando la eficiencia y la seguridad en la producción.
Estos robots se caracterizan por su alta precisión, su resistencia y su capacidad de trabajar sin descanso. Además, se programan para realizar tareas específicas, lo que permite un control preciso del proceso de producción.
Lee TambiénServomotor Partes: Guía Completa para Proyectos de ElectricidadRobots de Ensamblaje
Los robots de ensamblaje están diseñados para realizar tareas específicas de ensamblaje con precisión y rapidez. Son cruciales en la industria electrónica, donde la precisión y la eficiencia son esenciales para la producción de dispositivos electrónicos. Sus funciones principales incluyen:
- Montaje de componentes: Los robots de ensamblaje pueden colocar componentes electrónicos con precisión milimétrica, garantizando un montaje perfecto y evitando errores.
- Soldadura de componentes: Los robots de ensamblaje pueden soldar componentes electrónicos con precisión y velocidad, lo que reduce el tiempo de producción y mejora la calidad del producto final.
- Inspección de productos: Después del ensamblaje, los robots de ensamblaje pueden inspeccionar los productos para detectar errores y garantizar la calidad.
Estos robots utilizan sensores para identificar componentes, realizar movimientos precisos y asegurar un ensamblaje de alta calidad. Su precisión es fundamental para la producción de dispositivos electrónicos complejos, que requieren un alto nivel de detalle en su ensamblaje.
Robots Educativos
¿Te interesa la robótica? Los robots educativos son la puerta de entrada al mundo de la robótica para estudiantes de todas las edades. Su diseño sencillo y fácil de programar permite a los estudiantes aprender los conceptos básicos de la robótica, la programación y la electrónica.
Estos robots son herramientas educativas que ayudan a:
- Aprender sobre la robótica: Los estudiantes pueden aprender sobre los diferentes componentes de un robot, como sensores, motores y actuadores, y cómo funcionan juntos.
- Desarrollar habilidades de programación: Los robots educativos utilizan lenguajes de programación simples, que permiten a los estudiantes aprender a programar y controlar el comportamiento del robot.
- Fomentar la creatividad: Los robots educativos permiten a los estudiantes diseñar y construir sus propios robots, experimentando con diferentes componentes y soluciones.
Los robots educativos son ideales para proyectos de electrónica, ya que permiten aprender los conceptos básicos de la robótica de forma práctica y divertida.
Componentes Clave de un Robot Poliarticulado
Los robots poliarticulados se componen de diversos elementos que trabajan juntos para realizar las tareas para las que fueron diseñados. Aquí te presentamos los principales componentes:
Estructura del Robot
La estructura del robot es su esqueleto, la base sobre la que se construyen los demás componentes. La estructura puede ser de diversos materiales, como aluminio, acero o plástico, dependiendo de la aplicación del robot y las condiciones del entorno en el que va a operar.
- Tipos de estructuras:
- Estructura articulada: Esta estructura se compone de varias articulaciones que permiten al robot moverse en diferentes direcciones.
- Estructura paralela: Esta estructura se caracteriza por tener varios miembros que se conectan en puntos fijos, creando una plataforma móvil.
- Estructura de cadena cinemática: Esta estructura combina elementos de estructuras articuladas y paralelas, ofreciendo mayor flexibilidad y capacidad de movimiento.
Articulaciones y Grados de Libertad
Las articulaciones son los puntos de unión entre las diferentes partes del robot, que le permiten realizar movimientos. Cada articulación tiene un grado de libertad, que define el rango de movimiento que puede realizar.
- Tipos de articulaciones:
- Articulación rotatoria: Permite al robot girar alrededor de un eje.
- Articulación prismática: Permite al robot moverse linealmente a lo largo de un eje.
- Articulación esférica: Permite al robot moverse en tres dimensiones, como una articulación de hombro humano.
El número de grados de libertad de un robot determina la complejidad de los movimientos que puede realizar. Los robots con mayor número de grados de libertad son más flexibles y pueden realizar movimientos más complejos.
Actuadores
Los actuadores son los músculos del robot, los que permiten que se mueva. Los actuadores convierten la energía eléctrica, hidráulica o neumática en movimiento mecánico.
Lee También Relatran: Simulador de Mecanismos Online para Secundaria Descarga y Practica
Relatran: Simulador de Mecanismos Online para Secundaria Descarga y Practica- Tipos de actuadores:
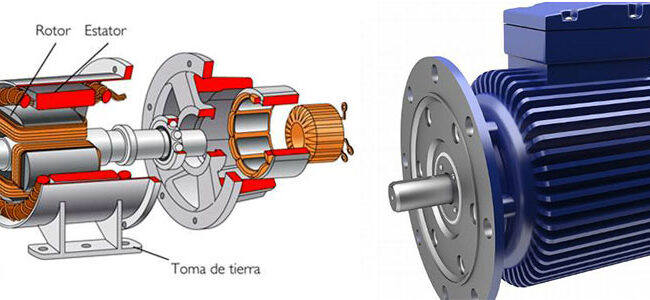
- Motores: Los motores son los actuadores más comunes en robots. Se usan para generar movimiento rotatorio.
- Actuadores lineales: Estos actuadores generan movimiento lineal.
- Actuadores hidráulicos: Los actuadores hidráulicos utilizan la presión de un fluido para generar fuerza.
- Actuadores neumáticos: Los actuadores neumáticos utilizan la presión del aire para generar fuerza.
Controlador
El controlador es el cerebro del robot, el que recibe las órdenes y las traduce en movimientos. Los controladores modernos utilizan microprocesadores y sistemas de software para controlar el movimiento del robot, procesar datos de los sensores y gestionar la interacción con el entorno.
- Tipos de controladores:
- Controladores basados en microprocesadores: Estos controladores utilizan un microprocesador para ejecutar programas y controlar el robot.
- Controladores basados en FPGA: Estos controladores utilizan un FPGA para realizar operaciones de procesamiento de señales en tiempo real.
- Controladores basados en PLC: Estos controladores se utilizan en entornos industriales y ofrecen una alta confiabilidad.
Sensores
Los sensores son los ojos y los oídos del robot, los que le permiten percibir su entorno. Los sensores recopilan información sobre el entorno, como la distancia, la temperatura, la presión y la posición del robot, y la envían al controlador para que este tome decisiones.
- Tipos de sensores:
- Sensores de distancia: Estos sensores miden la distancia entre el robot y un objeto.
- Sensores de temperatura: Estos sensores miden la temperatura del entorno.
- Sensores de presión: Estos sensores miden la presión de un fluido.
- Sensores de posición: Estos sensores miden la posición del robot en el espacio.
Actuadores en Robots Poliarticulados
Los actuadores son los responsables de generar el movimiento en los robots poliarticulados. La elección del actuador adecuado es crucial para el correcto funcionamiento del robot, ya que determina su fuerza, velocidad, precisión y eficiencia.
Motores DC
Los motores DC son uno de los tipos de actuadores más comunes en robótica. Se caracterizan por su simplicidad, bajo costo y facilidad de control. Funcionan aplicando una corriente eléctrica a una bobina, generando un campo magnético que hace girar un eje.
Ventajas:
- Bajo costo
- Fácil de controlar
- Alta eficiencia energética
Desventajas:
- Baja precisión
- Limitado torque
Motores Stepper
Los motores stepper son motores que se mueven en pasos discretos, lo que les permite un control de posición muy preciso. Funcionan mediante una serie de bobinas que se energizan secuencialmente, provocando que el eje rote en pasos definidos.
Ventajas:
- Alta precisión
- Control de posición preciso
- Bajo mantenimiento
Desventajas:
- Velocidad limitada
- Mayor costo que los motores DC
Servomotores
Los servomotores son motores que se utilizan para controlar la posición y la velocidad de un eje. Funcionan con un mecanismo de retroalimentación, que permite al motor ajustar su posición o velocidad según la señal recibida.
Lee También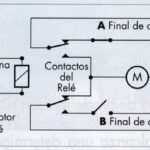 Ejemplos de Proyectos de Mecanismos: Ascensor, Puente Móvil y Más
Ejemplos de Proyectos de Mecanismos: Ascensor, Puente Móvil y MásVentajas:
- Alto torque
- Alta precisión
- Velocidad controlada
Desventajas:
- Mayor costo que otros motores
- Mayor complejidad en el control
Actuadores de Gravedad
Los actuadores de gravedad utilizan la fuerza de la gravedad para generar movimiento. Por ejemplo, un robot con un brazo articulado puede utilizar su propio peso para bajar un objeto.
Ventajas:
- Bajo costo
- Bajo consumo de energía
Desventajas:
- Limitado rango de movimiento
- No se puede controlar la velocidad
Actuadores Eléctricos, Neumáticos e Hidráulicos
Además de los motores, existen otros tipos de actuadores que se utilizan en robots poliarticulados:
- Actuadores eléctricos: Estos actuadores utilizan la energía eléctrica para generar movimiento lineal o rotatorio. Son comunes en robots de tamaño pequeño y mediano.
- Actuadores neumáticos: Estos actuadores utilizan la presión del aire para generar movimiento. Se utilizan principalmente en robots industriales de gran tamaño.
- Actuadores hidráulicos: Estos actuadores utilizan la presión de un fluido para generar movimiento. Son ideales para robots que requieren gran fuerza.
Habilidades de los Robots Poliarticulados
Los robots poliarticulados pueden realizar una variedad de tareas, gracias a su diseño flexible y su capacidad de aprendizaje. Aquí te presentamos algunas de las habilidades más comunes:
Interacción con el Entorno
Los robots poliarticulados pueden interactuar con su entorno de forma segura y eficiente.
- Reconocimiento de objetos: Los robots pueden utilizar sensores para identificar objetos en su entorno, como paredes, obstáculos o personas.
- Navegación: Los robots pueden navegar por entornos complejos, utilizando mapas y sensores para evitar obstáculos.
- Manipulación de objetos: Los robots pueden levantar, transportar y manipular objetos con precisión, utilizando sus articulaciones y actuadores.
Manipulación de Objetos
Los robots poliarticulados son capaces de manipular objetos de diferentes formas y tamaños con precisión y rapidez.
- Agarre: Los robots pueden utilizar pinzas, garras o ventosas para agarrar objetos de diferentes formas.
- Sujeción: Los robots pueden sujetar objetos firmemente, utilizando sensores para determinar la fuerza necesaria.
- Movimiento: Los robots pueden mover objetos de un lugar a otro, utilizando sus articulaciones y actuadores para realizar movimientos precisos.
Los robots poliarticulados pueden navegar por entornos con obstáculos, utilizando sensores para detectar y evitarlos.
Lee También Aplicaciones de la Electrónica Digital: Ejemplos y Usos Modernos
Aplicaciones de la Electrónica Digital: Ejemplos y Usos Modernos- Detección de obstáculos: Los robots pueden utilizar sensores de ultrasonido, láser o visión artificial para detectar obstáculos.
- Planificación de rutas: Los robots pueden utilizar algoritmos de planificación de rutas para encontrar el camino más eficiente para llegar a su destino, evitando obstáculos.
- Evitar obstáculos: Los robots pueden ajustar su trayectoria o velocidad para evitar obstáculos de forma segura.
Recopilación de Información Geográfica
Los robots poliarticulados pueden recopilar información geográfica, utilizando sensores para crear mapas y obtener datos sobre el entorno.
- Cartografía: Los robots pueden crear mapas de entornos complejos, utilizando sensores de visión artificial y de distancia.
- Recopilación de datos: Los robots pueden recopilar datos sobre el entorno, como la temperatura, la humedad o la presencia de sustancias químicas.
Aprendizaje de Movimientos Autónomos
Los robots poliarticulados pueden aprender movimientos autónomos, utilizando técnicas de aprendizaje automático para mejorar sus habilidades.
- Aprendizaje por refuerzo: Los robots pueden aprender a realizar tareas a través de la experimentación y la recompensa por las acciones correctas.
- Aprendizaje supervisado: Los robots pueden aprender a realizar tareas a partir de datos preexistentes y ejemplos proporcionados por humanos.
- Aprendizaje no supervisado: Los robots pueden aprender a realizar tareas a partir de datos no etiquetados, identificando patrones y relaciones.
Toma de Decisiones Basadas en Datos
Los robots poliarticulados pueden tomar decisiones basadas en datos recopilados por sus sensores.
- Análisis de datos: Los robots pueden procesar datos recopilados por sus sensores para identificar patrones y tendencias.
- Toma de decisiones: Los robots pueden utilizar la información procesada para tomar decisiones sobre su comportamiento, como elegir la mejor ruta o manipular objetos de forma segura.
Planificación de Acciones Futuras
Los robots poliarticulados pueden planificar acciones futuras, utilizando algoritmos de planificación para anticiparse a los eventos y realizar tareas de forma eficiente.
- Predicción: Los robots pueden utilizar modelos de predicción para anticipar los eventos futuros, como el movimiento de objetos o las condiciones del entorno.
- Planificación: Los robots pueden planificar sus acciones para lograr un objetivo determinado, considerando las condiciones del entorno y los posibles obstáculos.
Aplicaciones de Robots Poliarticulados en Electrónica
Los robots poliarticulados juegan un papel fundamental en la industria electrónica, automatizando procesos de producción y permitiendo la creación de productos electrónicos complejos.
Ensamblaje de Componentes
Los robots poliarticulados son esenciales en el ensamblaje de componentes electrónicos, realizando tareas de alta precisión y velocidad.
- Montaje de placas de circuito impreso (PCB): Los robots colocan componentes electrónicos en las placas de circuito impreso con precisión milimétrica, asegurando un montaje de alta calidad.
- Soldadura de componentes: Los robots realizan la soldadura de componentes electrónicos con precisión y rapidez, mejorando la calidad del producto final.
- Ensamblaje de dispositivos electrónicos complejos: Los robots pueden ensamblar dispositivos electrónicos complejos, como teléfonos móviles, ordenadores portátiles y dispositivos electrónicos de consumo.
Producción en Línea
Los robots poliarticulados automatizan procesos de producción en línea, mejorando la eficiencia y la calidad.
- Transporte de materiales: Los robots transportan materiales y productos en línea de producción, optimizando el flujo de trabajo.
- Control de calidad: Los robots inspeccionan productos durante la producción, garantizando la calidad y detectando posibles defectos.
- Aumento de la productividad: Los robots permiten aumentar la producción, ya que trabajan de forma continua y sin descanso.
Exploración y Recopilación de Datos
Los robots poliarticulados pueden explorar entornos complejos y recopilar datos, ofreciendo valiosa información para la investigación y el desarrollo.
- Inspección de infraestructuras: Los robots pueden inspeccionar infraestructuras como puentes, túneles y edificios, detectando posibles daños o problemas.
- Exploración de ambientes peligrosos: Los robots pueden explorar entornos peligrosos para humanos, como zonas contaminadas o minas subterráneas, recopilando datos y ofreciendo información valiosa.
- Recopilación de datos científicos: Los robots pueden recopilar datos científicos en entornos hostiles o de difícil acceso, como el fondo del océano o la superficie de Marte.
Educación
Los robots poliarticulados son una herramienta educativa de gran valor, permitiendo a los estudiantes aprender sobre robótica, programación y electrónica de forma práctica.
- Proyectos de robótica educativa: Los estudiantes pueden diseñar, construir y programar sus propios robots, aprendiendo los principios básicos de la robótica.
- Simulación de procesos industriales: Los robots poliarticulados pueden simular procesos industriales reales, permitiendo a los estudiantes aprender sobre la automatización y la producción industrial.
- Desarrollo de habilidades para el futuro: Los robots poliarticulados preparan a los estudiantes para las profesiones del futuro, que se basan en la tecnología y la innovación.
Diseño de Robots Poliarticulados para Proyectos de Electrónica
El diseño de un robot poliarticulado requiere una planificación cuidadosa, teniendo en cuenta las necesidades del proyecto y los requisitos del entorno.
Lee También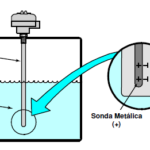 Diagrama Eléctrico Control Nivel Agua: Guía Completa Sensores, Circuito & Aplicaciones
Diagrama Eléctrico Control Nivel Agua: Guía Completa Sensores, Circuito & AplicacionesDeterminación de las Necesidades
Antes de comenzar el diseño, es esencial determinar las necesidades del proyecto.
- Tipo de tareas a realizar: ¿Qué tareas específicas debe realizar el robot? ¿Cuáles son los requisitos de precisión, velocidad y fuerza?
- Entorno de trabajo: ¿Dónde se utilizará el robot? ¿Cuáles son las condiciones del entorno, como la temperatura, la humedad y la presencia de obstáculos?
- Recursos disponibles: ¿Qué presupuesto se dispone para el proyecto? ¿Qué componentes y herramientas se pueden utilizar?
Control de los Motores
El control de los motores es crucial para el funcionamiento del robot.
- Selección de motores: ¿Qué tipo de motores se necesitan para las tareas que debe realizar el robot? ¿Qué torque, velocidad y precisión se requieren?
- Control de movimiento: ¿Cómo se controlarán los motores? ¿Se utilizarán controladores de motores, microcontroladores o sistemas de control más complejos?
- Control de posición: ¿Cómo se controlará la posición de los motores? ¿Se utilizarán sensores de posición o algoritmos de control de posición?
Diseño Mecánico
El diseño mecánico del robot es fundamental para su estabilidad, resistencia y funcionamiento.
- Estructura: ¿Qué tipo de estructura se utilizará? ¿Qué material es el más adecuado para el robot? ¿Cómo se diseñará la estructura para soportar el peso y las fuerzas que se aplicarán?
- Articulaciones: ¿Qué tipo de articulaciones se utilizarán? ¿Cómo se diseñarán para garantizar un movimiento fluido y preciso?
- Actuadores: ¿Cómo se integrarán los actuadores en la estructura del robot? ¿Cómo se garantizará la conexión segura y el control preciso de los actuadores?
Selección de Materiales
La selección de materiales es crucial para la resistencia, la durabilidad y el funcionamiento del robot.
- Estructura: ¿Qué material es el más adecuado para la estructura? ¿Aluminio, acero, plástico o fibra de carbono?
- Componentes: ¿Qué materiales se utilizarán para los componentes del robot, como los engranajes, las poleas y las correas?
- Sensores: ¿Qué tipo de materiales se utilizarán para los sensores? ¿Qué materiales son resistentes a las condiciones del entorno en el que se utilizará el robot?
Recuerda que el diseño de un robot poliarticulado requiere un conocimiento profundo de la robótica, la electrónica y la mecánica.
No dudes en consultar a expertos en el campo para obtener ayuda con el diseño y la construcción de tu robot.
¡Con los conocimientos adquiridos en este artículo, estarás listo para crear proyectos de electrónica con robots poliarticulados!
Video sobre Robots Poliarticulados: Guía Completa para Proyectos de Electrónica
Preguntas Frecuentes sobre Robots Poliarticulados
¿Qué son exactamente los robots poliarticulados y por qué son tan relevantes en proyectos de electrónica?
Los robots poliarticulados son máquinas programables con múltiples articulaciones que les permiten imitar movimientos humanos. Estos robots, también llamados robots multifunción, se distinguen por su versatilidad, capacidad de realizar tareas complejas y su creciente importancia en el ámbito de la electrónica. Su relevancia radica en la posibilidad de realizar tareas que van desde la manipulación de objetos pequeños hasta el ensamblaje de componentes electrónicos, pasando por la inspección de productos y la recolección de datos. Son una herramienta fundamental para la automatización de procesos y la producción de dispositivos electrónicos complejos.
¿Cómo se diferencian los robots poliarticulados de otros tipos de robots?
Los robots poliarticulados se diferencian de otros tipos de robots en su estructura y capacidad de movimiento. A diferencia de los robots móviles que se desplazan por un entorno, los robots poliarticulados se caracterizan por su estructura articulada que les permite realizar movimientos complejos en un espacio limitado. Esto los hace ideales para tareas de manipulación y ensamblaje, donde la precisión y el control son fundamentales.
¿Qué tipos de actuadores se utilizan en los robots poliarticulados y cuál es su función?
Los actuadores son los músculos del robot, los que permiten que se mueva. Existen diversos tipos de actuadores utilizados en los robots poliarticulados, cada uno con sus ventajas y desventajas. Entre ellos se encuentran los motores DC, motores stepper, servomotores, actuadores de gravedad, eléctricos, neumáticos e hidráulicos. La elección del actuador adecuado dependerá de la tarea a realizar, la fuerza requerida, la precisión y la velocidad de movimiento.
¿Cómo se programan los robots poliarticulados y qué tipo de lenguajes se utilizan?
La programación de robots poliarticulados es un proceso complejo que involucra la creación de instrucciones para que el robot realice tareas específicas. Se utilizan lenguajes de programación específicos para robots, como ROS (Robot Operating System), que permiten controlar el movimiento, la interacción con el entorno y el procesamiento de datos. La programación de robots poliarticulados requiere conocimientos de informática, robótica y control.
¿Cuáles son algunas de las aplicaciones más comunes de los robots poliarticulados en la industria electrónica?
Los robots poliarticulados se utilizan en una amplia gama de aplicaciones dentro de la industria electrónica, incluyendo el ensamblaje de componentes, la producción en línea, la exploración y recolección de datos, y la educación. Son esenciales para la producción de dispositivos electrónicos complejos, la automatización de procesos y el desarrollo de nuevas tecnologías.
Concluyendo
Este viaje al fascinante mundo de los robots poliarticulados nos ha revelado su intrincada estructura, sus capacidades multifacéticas y su potencial transformador en el ámbito de la electrónica. Desde el ensamblaje de componentes hasta la exploración de entornos peligrosos, estos robots, verdaderos artesanos digitales, se erigen como herramientas esenciales para un futuro cada vez más automatizado. La guía detallada presentada aquí, que abarca desde la selección de actuadores hasta la planificación de acciones futuras, nos dota de las herramientas necesarias para adentrarnos en el apasionante terreno de la robótica.
Compartelo
¿Te apasiona la electrónica y quieres adentrarte en el mundo de la robótica? ¡Este artículo es para ti! Descubre todo lo que necesitas saber sobre los robots poliarticulados: su funcionamiento, componentes, aplicaciones y mucho más.
Con ejemplos concretos y una explicación detallada, este artículo te ayudará a comprender la importancia de estos robots en proyectos de electrónica. ¡No te lo pierdas!
Comparte este conocimiento con tus amigos y compañeros que también se apasionan por la tecnología y la robótica.
¡Comparte este artículo ahora!
Servomotor Partes: Guía Completa para Proyectos de Electricidad
Motores en Derivación: Funcionamiento, Ventajas y Aplicaciones

Cómo Hacer un Detector de Metales Casero Potente: Guía Paso a Paso

Hadrian X: El robot albañil que construye casas 4 veces más rápido
Curso Robótica para Principiantes: Construye tu Propio Robot
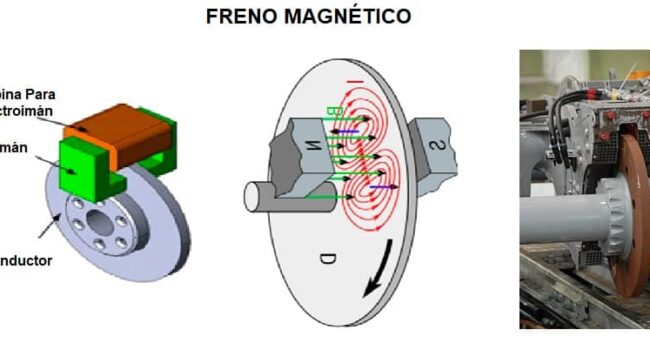
Freno Magnético: Funcionamiento, Aplicaciones y Experimento Simple
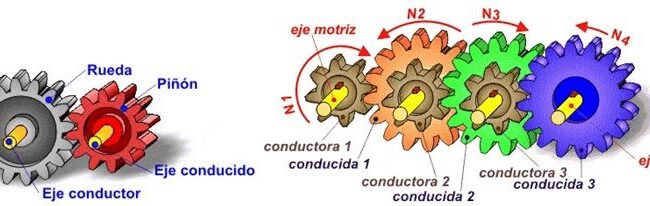
Engranajes: Guía Completa de Tipos, Cálculos y Aplicaciones
Sentido de Giro de un Motor Eléctrico: Guía Completa para Principiantes
Tipos de Robots: Guía Completa y Clasificación
Deja una respuesta
También te puede interesar: